
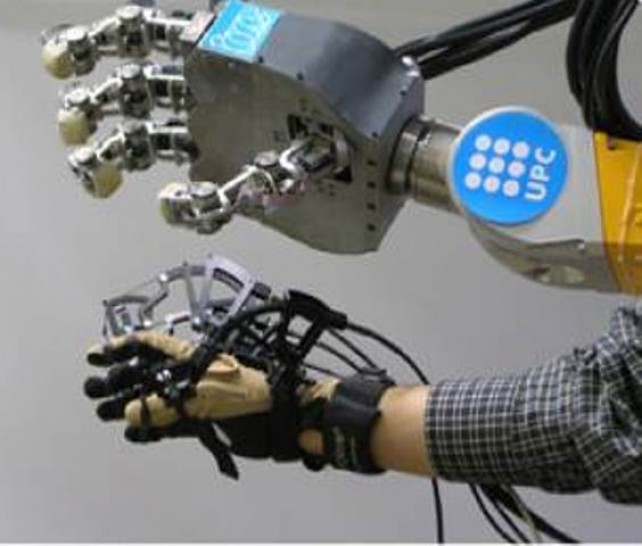
En ese marco Feijóo, director de investigación del Instituto de Organización y Control de Sistemas Industriales de la Universidad Politécnica de Cataluña, presentará el trabajo realizado en ese instituto en el área de prensión y manipulación de objetos en robótica. Sobre ese eje expondrá los resultados obtenidos en diseño y construcción de una mano robótica, la determinación de puntos óptimos de prensión sobre un objeto, como también la determinación de la configuración adecuada de la mano y del brazo para sujetar el objeto y de los movimientos necesarios para alcanzar el objetivo sin colisiones. Asimismo, explicará la coordinación de dos robots para manipular objetos en un espacio de trabajo común.
La participación a la conferencia es libre y gratuita, el jueves 15 de noviembre, a las 18, en el Anfiteatro Este (primer piso del edificio de Gobierno).
Raúl Suárez Feijóo
Ingeniero electrónico por la Universidad Nacional de San Juan y doctor ingeniero de Telecomunicaciones por la Universidad Politécnica de Cataluña. Actualmente, se desempeña como director de Investigación del Instituto de Organización y Control de Sistemas Industriales de la Universidad Politécnica de Cataluña. Sus líneas de investigación son automatización, robótica, control, integración sensorial, inteligencia artificial, planificación de movimientos finos en robótica, coordinación de robots, tareas de ensamblado. Prensión y manipulación y manos mecánicas.
